Portfolio
Click pic to view more
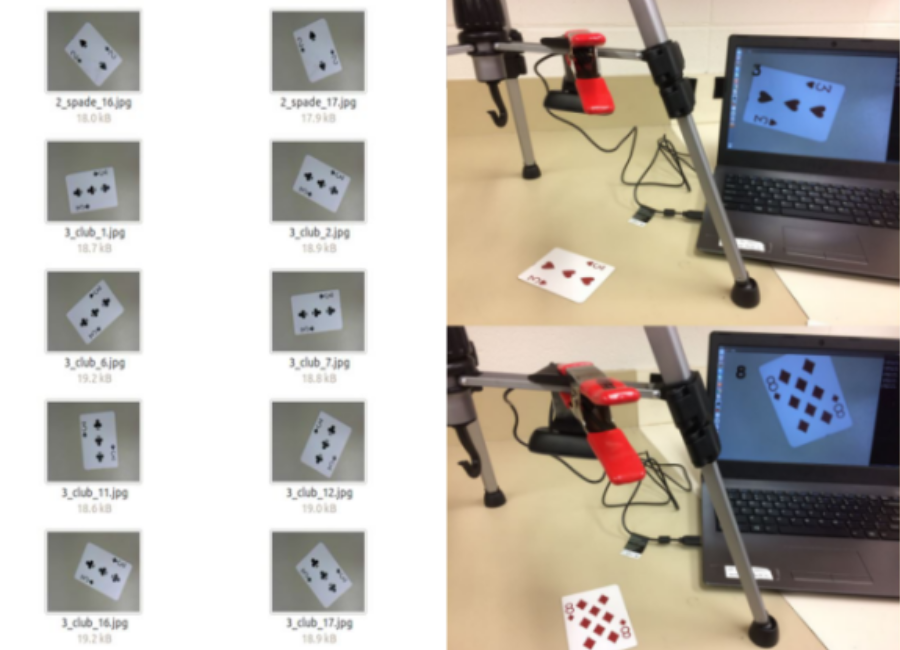
Card Classification
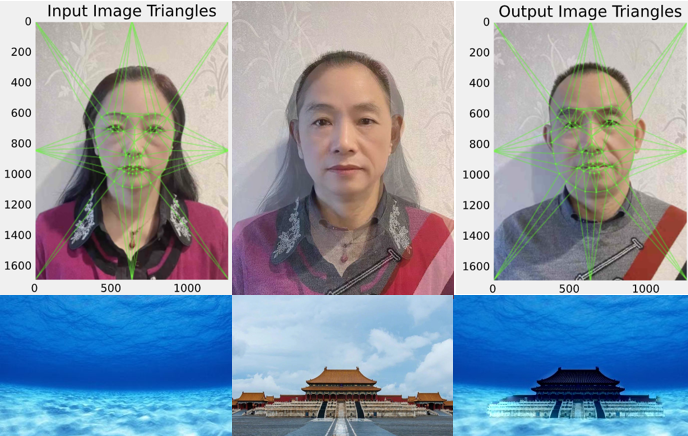
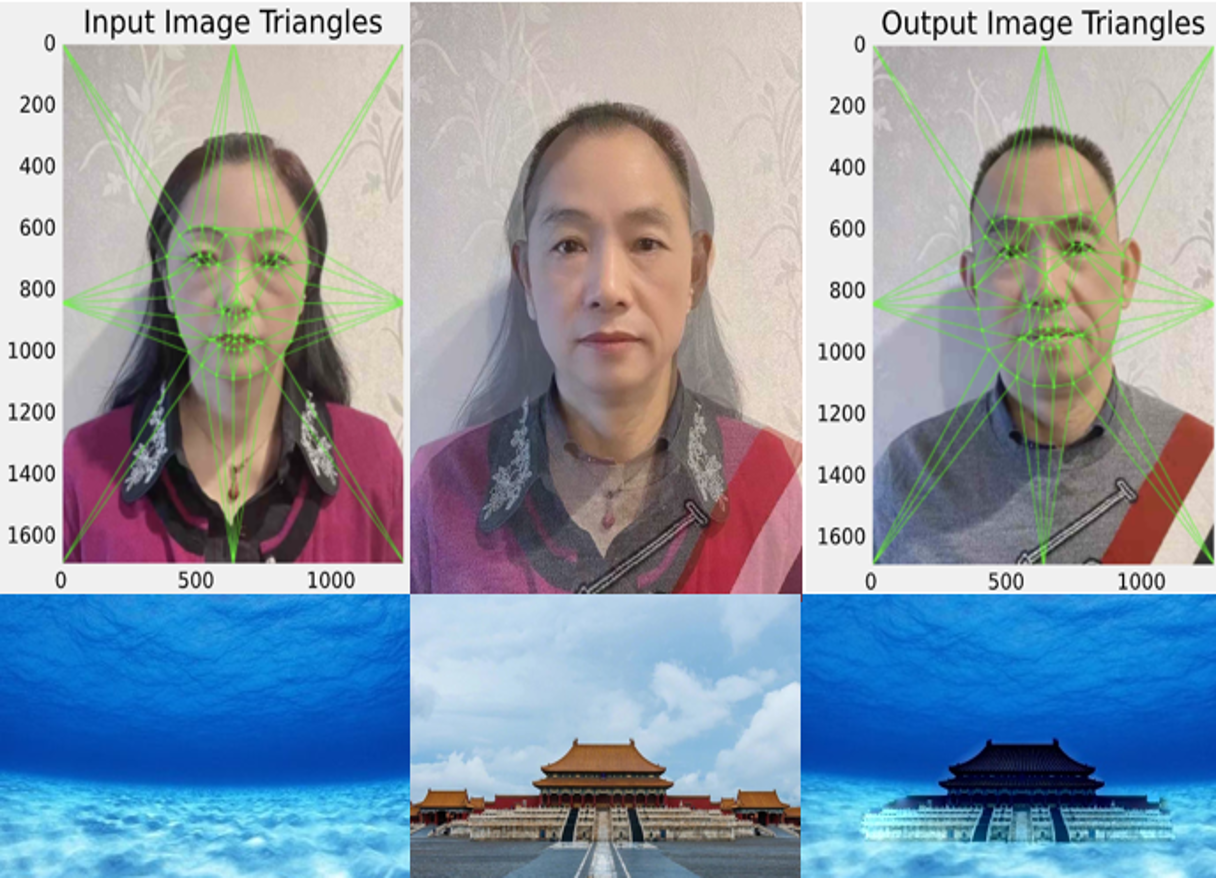
Face Morphing and Poisson Image Editing
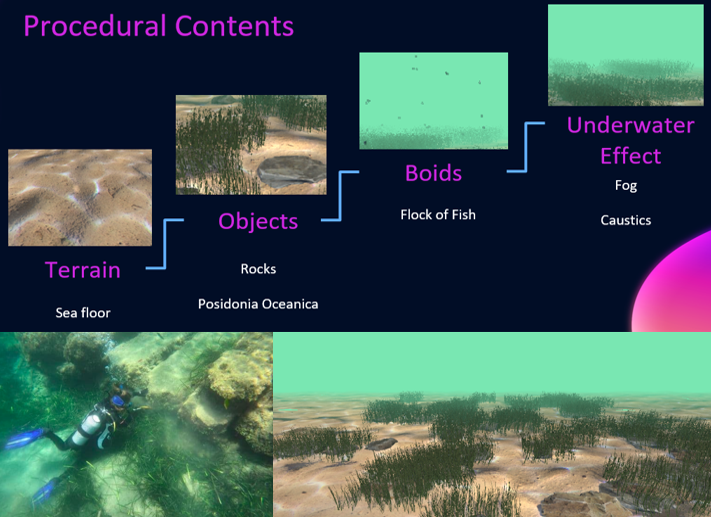
Procedural Generation for Underwater Site
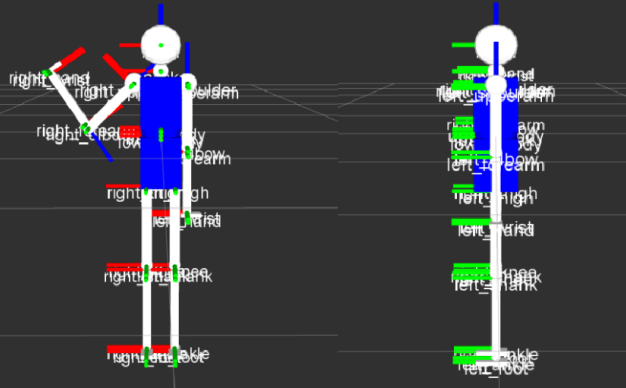
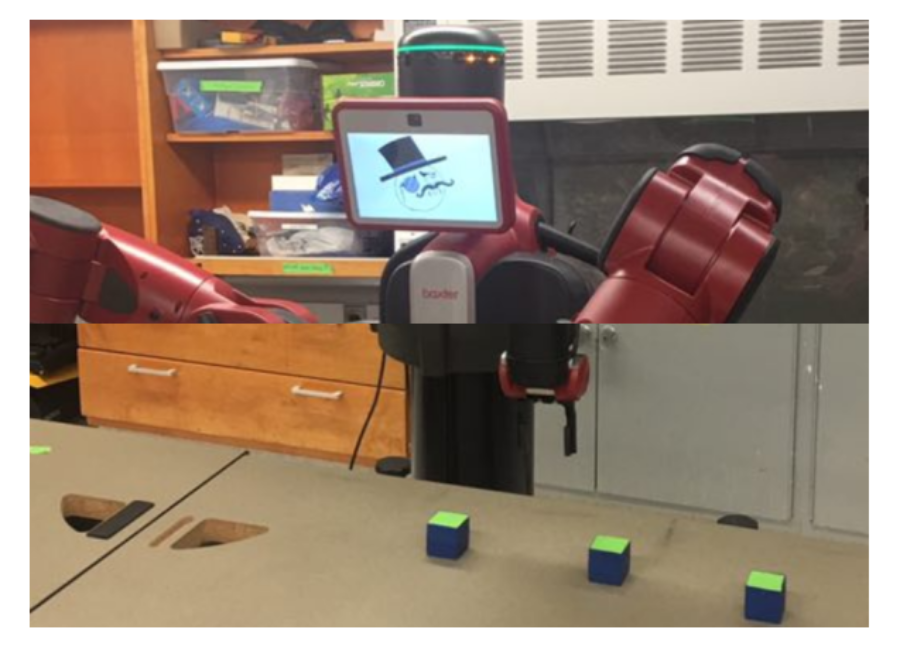
Baxter Robot Control and Shuffle
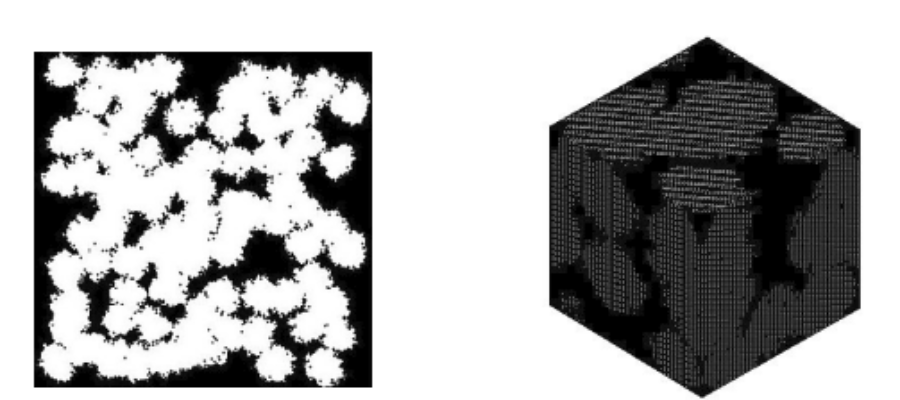
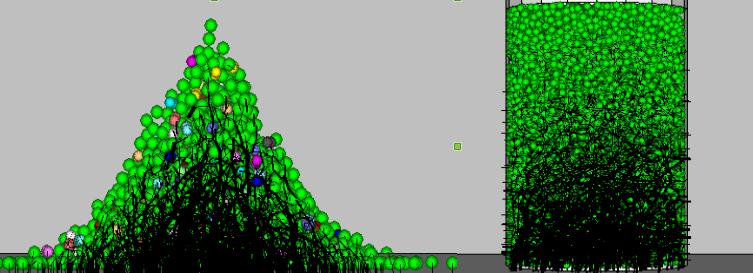
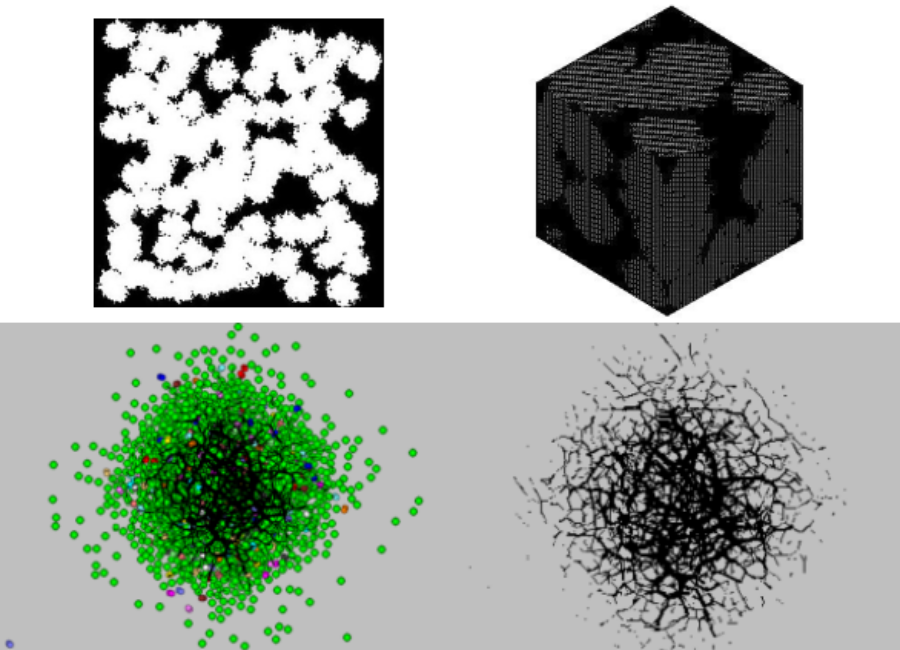
Modeling: Lithium Ion Battery and Arching Effect of Sand
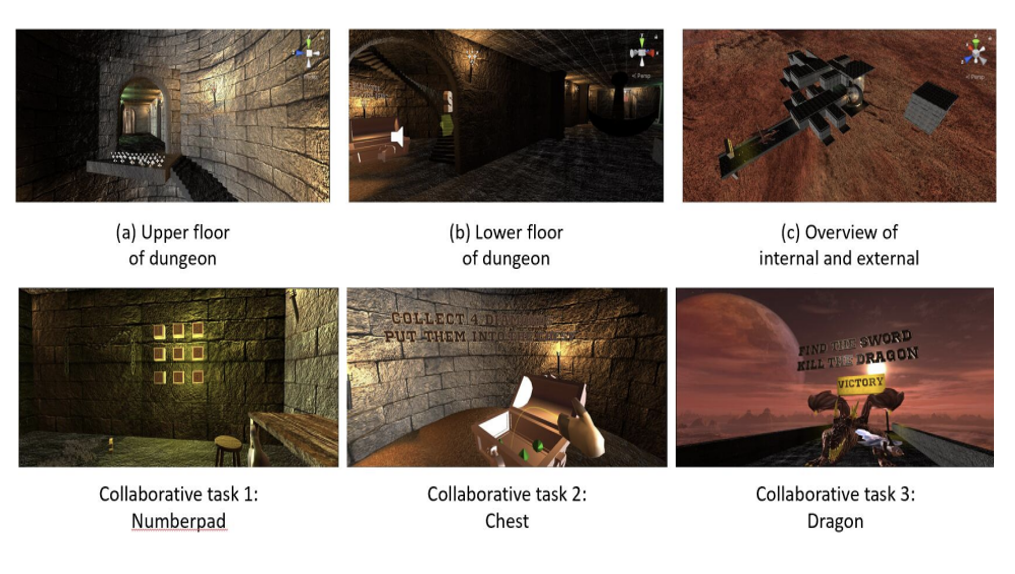
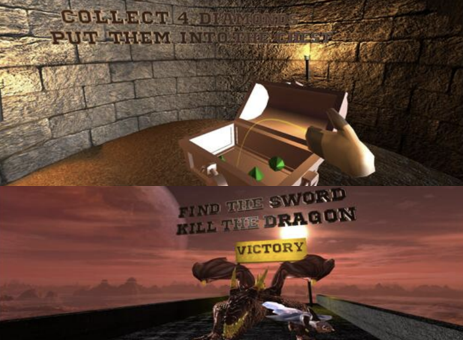
Escape the Dungeon in Virtual Reality
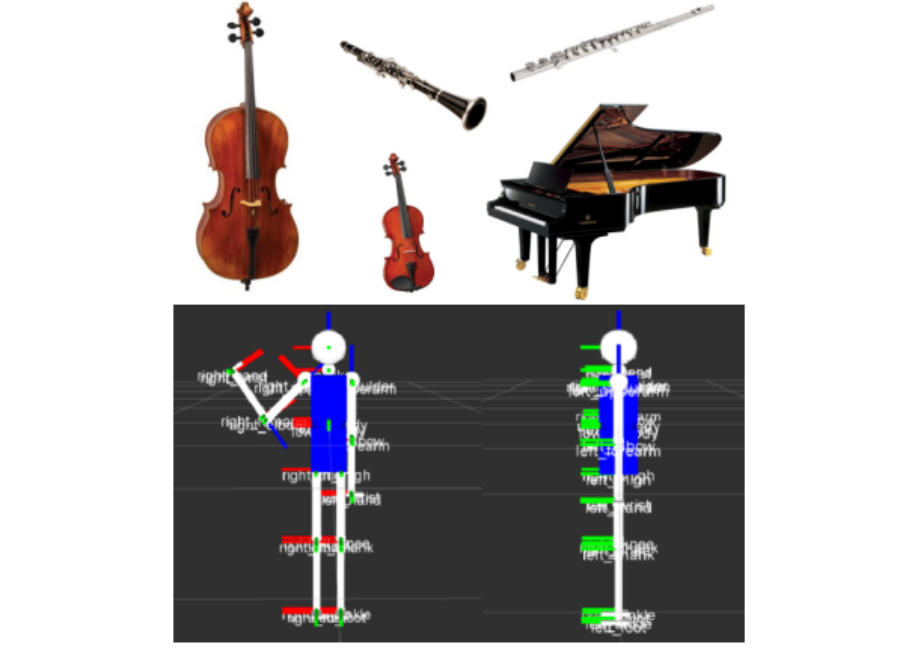
Music Classification and Robot Dancing
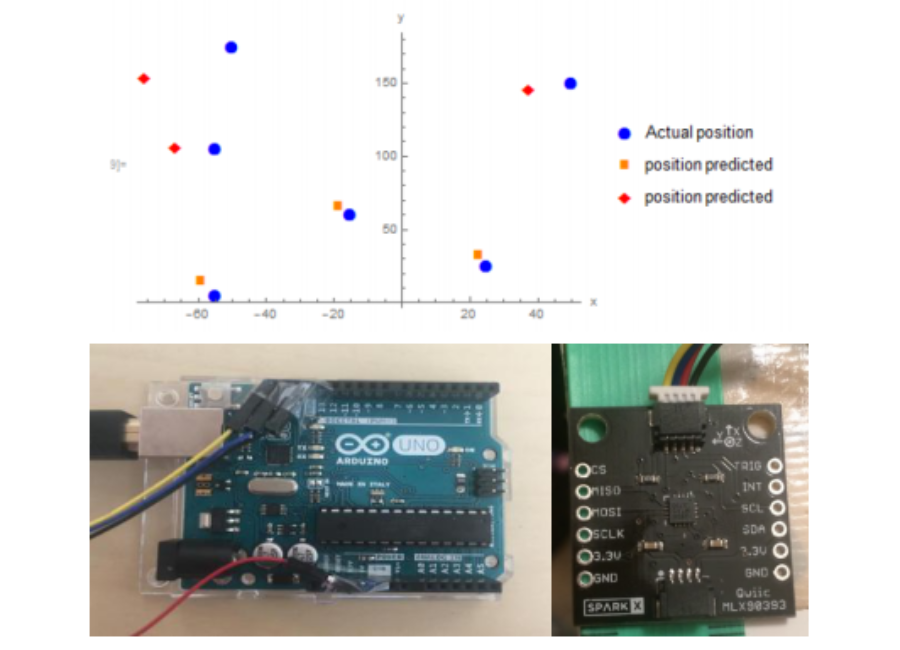
Magnetic Tracking System
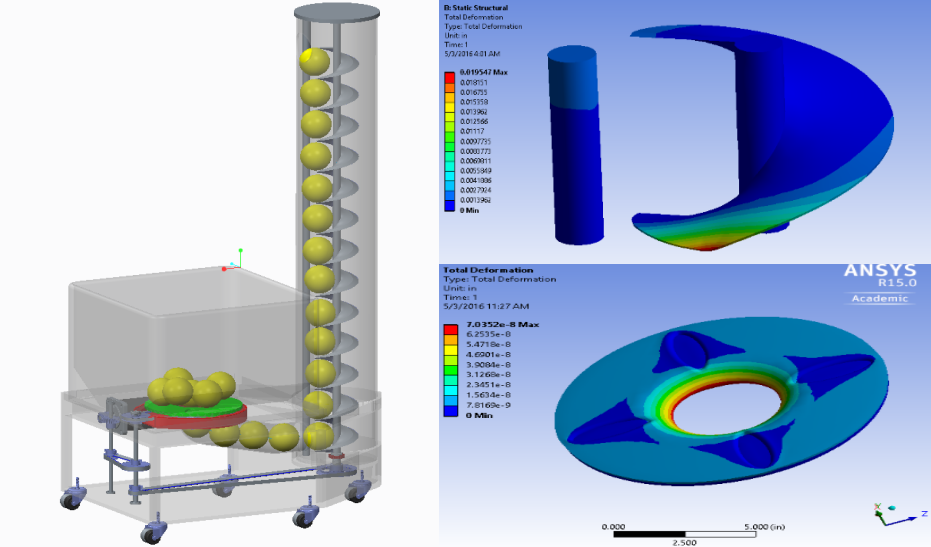
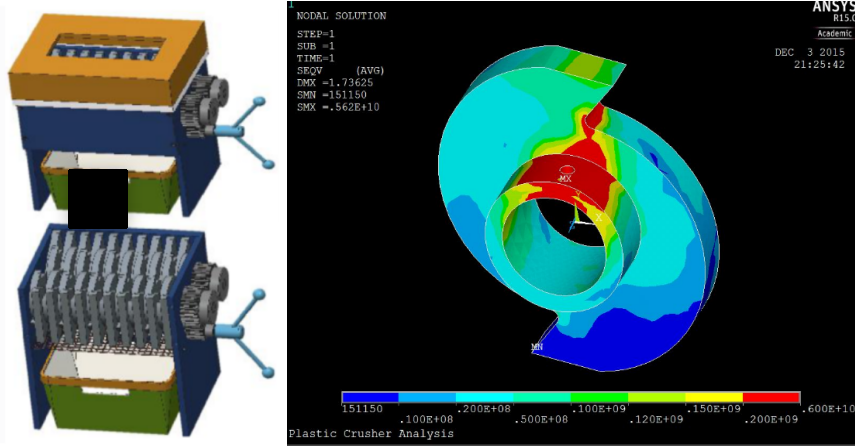
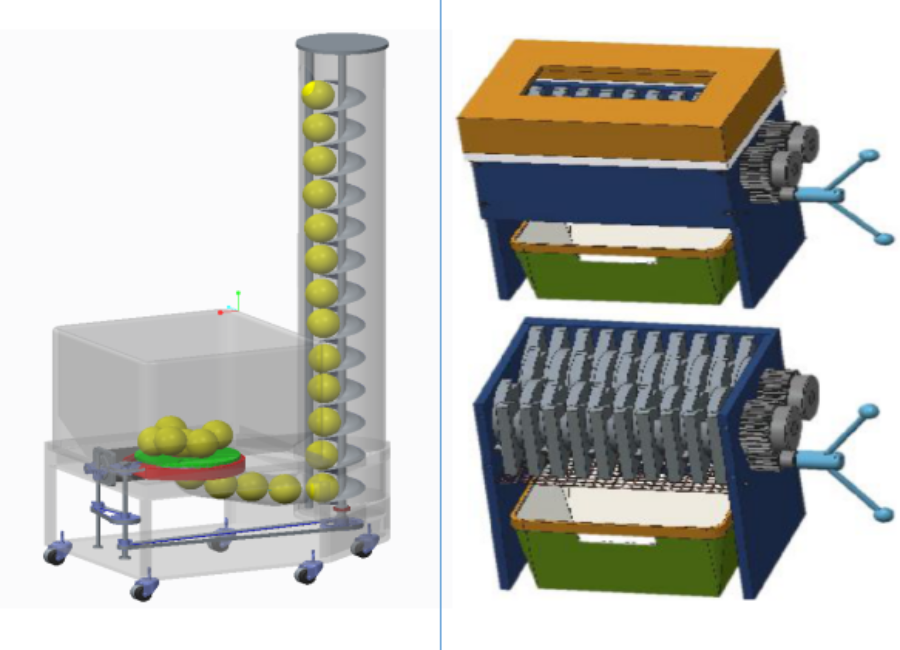
Machine Design: High Capacity Ball Feeder and Plastic Crusher
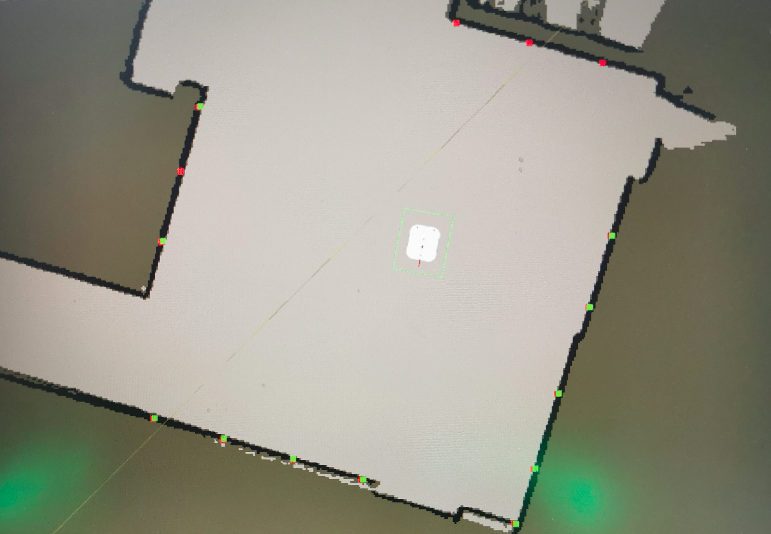
Mapping and Localization
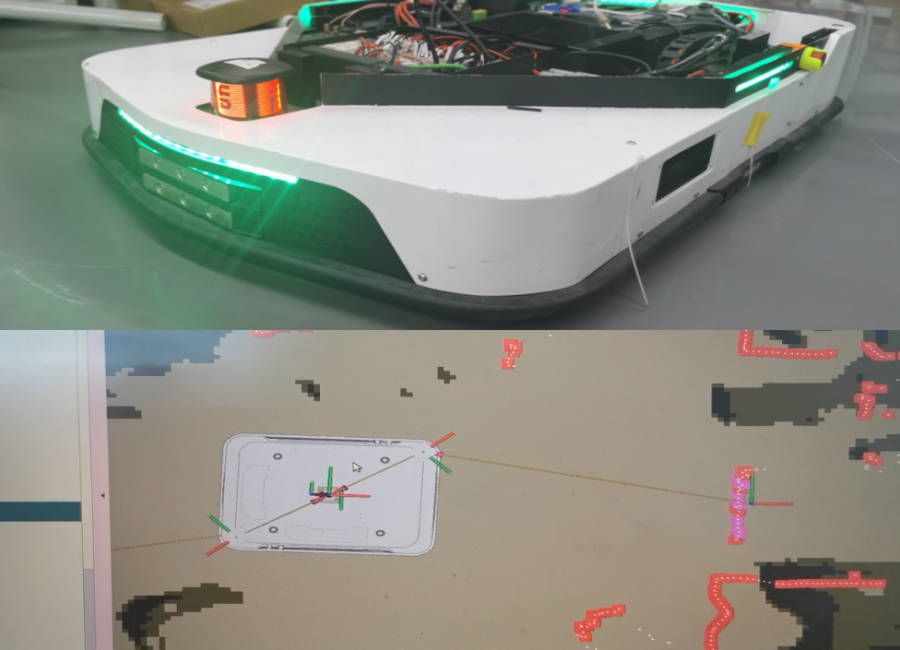
Accurate Docking

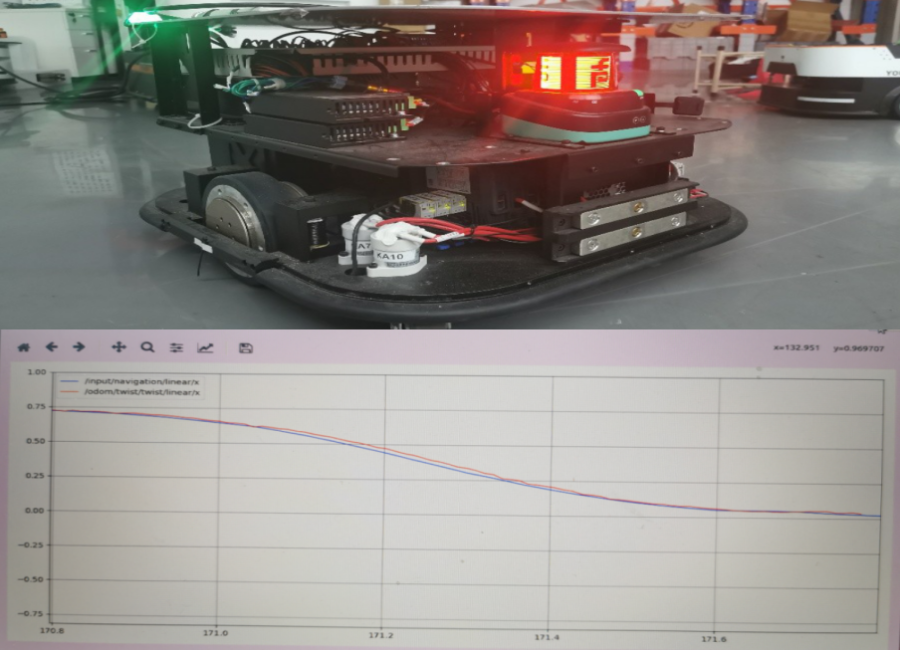
Velocity Control